Self-Balancing Lego Robot: From Dynamic Modeling to Hardware Implementation
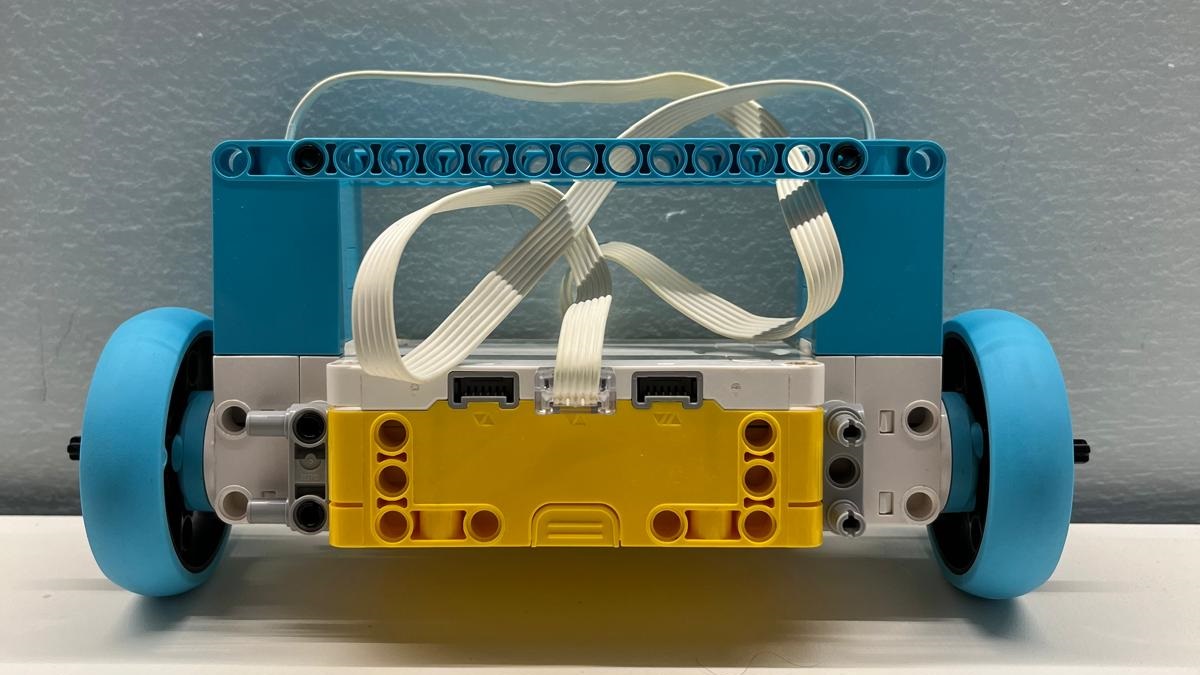
Designed and built a self-balancing robot using Lego Spike, starting with deriving equations of motion and formulating a state-space model. Validated the design through MATLAB simulations, static/dynamic sensor testing, and iterative hardware prototyping. Achieved close alignment between simulated predictions and physical performance, demonstrating robust control system integration. The robot was built using two motors, two wheels, and the LEGO Spike hub, which includes a built-in battery and an IMU (gyroscope + accelerometer). All code runs directly on the hub. A picture of the hardware setup is shown below.
Modelling the System
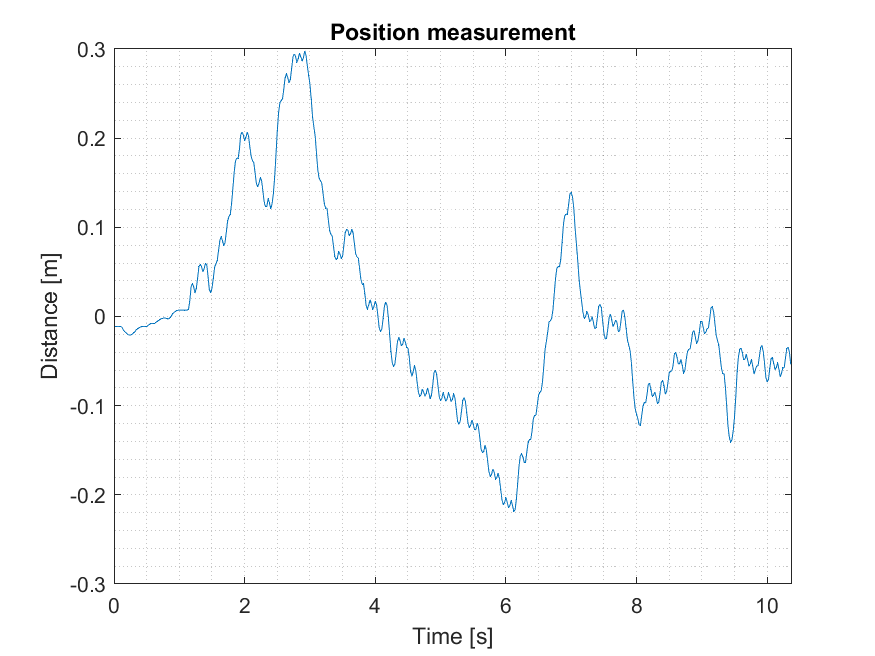
The dynamic model was derived using Newton’s laws, summing forces and moments. The system considers four states: position, linear velocity, tilt angle, and angular velocity. A small-angle approximation was applied (sin(θ)≈θ, cos(θ)≈1), introducing an error below 1.5% for angles between ±15°. The resulting state-space representation was used both for simulation and control design.
Control Approach
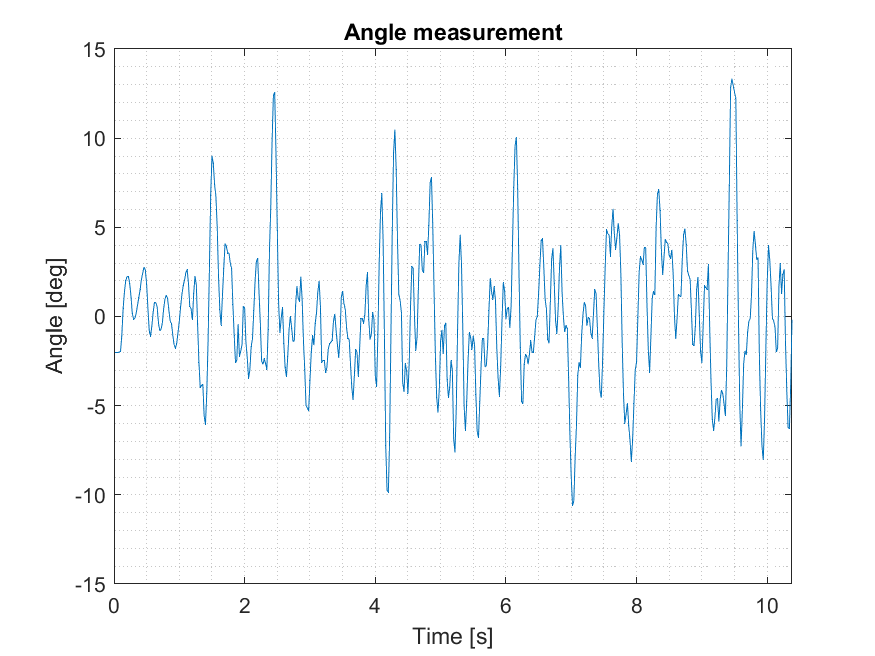
- PID Controller: Tuned using trial and error, starting from the proportional gain (based on the motors’ speed limits), followed by derivative and integral gains. The angle was estimated using a complementary filter combining accelerometer and gyroscope data.
- LQR: Designed from the linearized state-space model. The 𝑄 matrix emphasized minimizing error, while 𝑅 penalized control effort lightly to allow quick corrections.
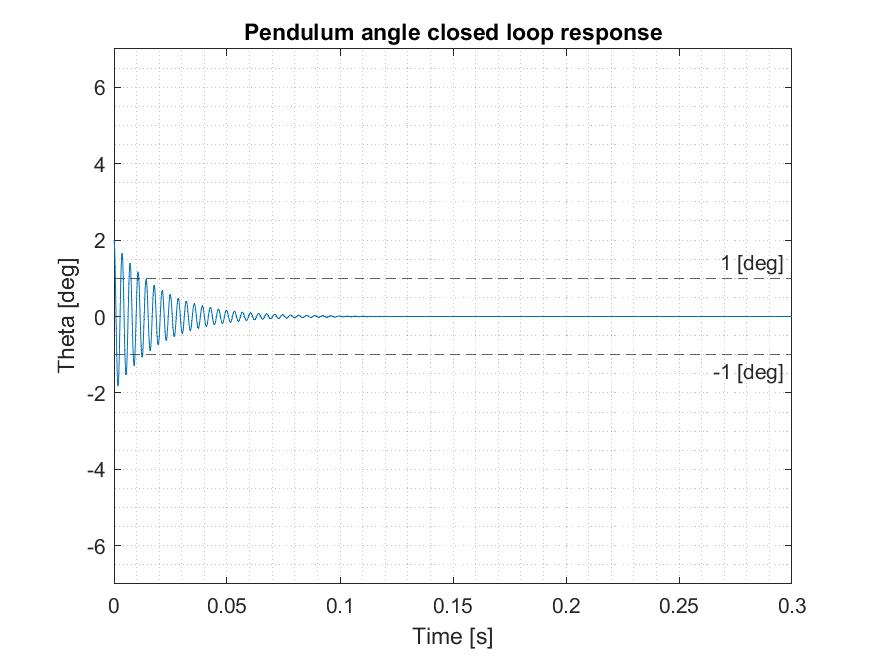
Simulations
Challenges Encountered
- Backlash between motors and wheels caused false readings; a buffer was added to ignore small encoder changes, but this only partially improved behavior.
- Surface friction affected PID performance; the robot was more stable on high-friction surfaces like blankets. LQR was more robust since it factored friction into the model.
- SPIKE Python limitations made real-time logging and control difficult. Lowering the data logging frequency improved responsiveness.
Final Results
The LQR controller consistently stabilized the robot for several minutes (battery-dependent). In contrast, the PID controller showed inconsistent behavior, with brief stabilization (up to a minute) depending on the surface and tuning.